The Local Interconnect Network (LIN) bus helps parts of a car talk to each other. It gives a simple and low-cost way to share data. This system links sensors, switches, and control units through one wire.
Car makers use the LIN bus to run things like heated seats, mirrors, windows, and lights. These features are important but not safety-critical. So, LIN offers a smart and affordable solution. Each LIN bus system uses one master controller. This LIN master sends orders to many LIN nodes. These nodes work as LIN slaves, each with a specific job.
For example, a LIN slave device might move a seat or read a temperature sensor. All tasks run smoothly when each node follows the master’s timing. As cars become smarter, LIN bus issues cause more trouble. Faulty LIN communication can break comfort features or show error codes.
What Is The LIN Bus System?
The Local Interconnect Network (LIN) bus is a low-cost serial communication protocol used in cars. Engineers use it to connect embedded systems like sensors, actuators, and switches. This setup allows different parts of the car to talk to each other quickly and simply.
Unlike the Controller Area Network (CAN), which handles fast, safety-critical messages, the LIN protocol manages slower, less critical tasks. It works well for comfort features like door locks, seat adjusters, and mirror controls.
The LIN bus system uses a one-wire communication setup. This single wire cuts down on weight, wiring, and cost. As a result, car makers rely on LIN for many small but important tasks in modern vehicles.
You’ll often find LIN nodes inside car doors or under seats. These slave devices follow commands from a central master node. Each switch or sensor linked to the LIN network helps keep vehicle functions smooth and responsive.
What Is A LIN bus fault?
A LIN bus fault occurs when there’s a disruption in the communication between the LIN master and its slave devices. This can happen due to issues in the LIN data transmission, such as signal interference, incorrect timing, or physical wire damage.
When a fault happens, the LIN master may fail to send or receive data from the LIN nodes, causing system malfunctions. Detecting these faults early helps prevent larger issues in vehicle systems, ensuring reliable operation of functions like seat controls and sensor readings.
How Does LIN Bus Work?
The LIN bus uses a master-slave communication structure to manage data flow across the network. A single LIN master initiates and controls all LIN communication, while multiple LIN slave nodes respond with the necessary data.
This setup ensures that every LIN node follows a structured and predictable sequence. The LIN signal travels through a single wire, making it simpler and more affordable than other bus systems. The protocol supports low-speed data exchange, which is ideal for non-critical vehicle functions. Each node can also switch between sleep and active modes, improving power efficiency in embedded systems.
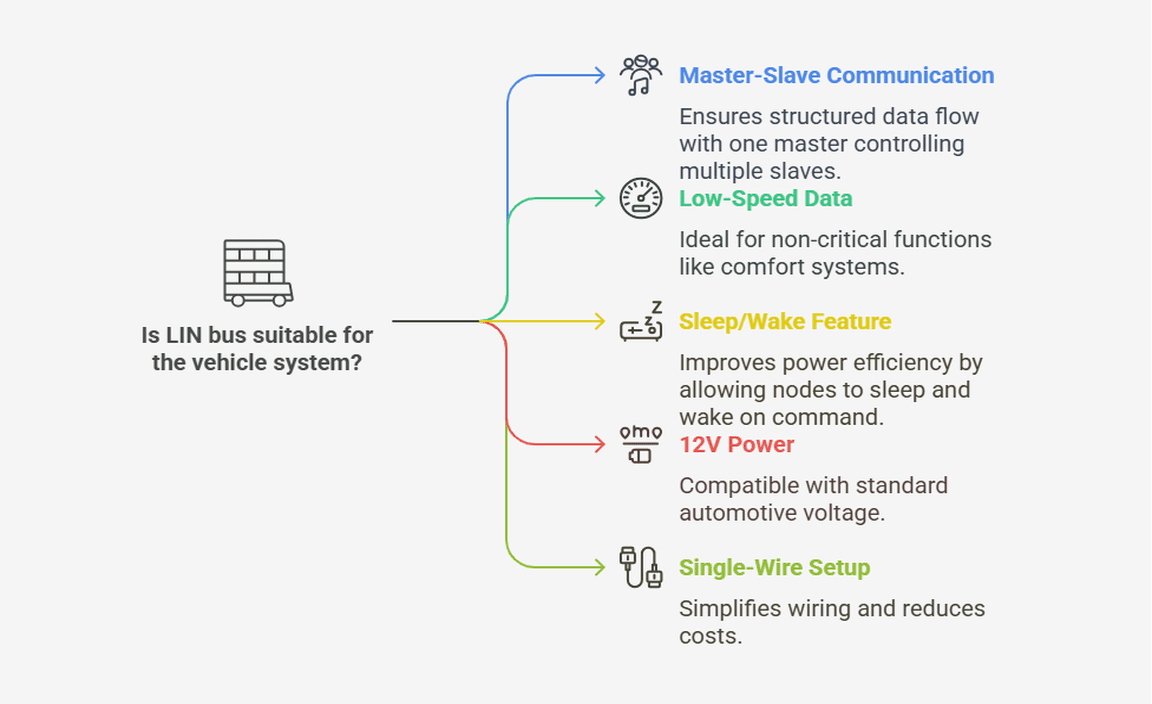
Key features of how the LIN bus works:
- Master-slave communication: One LIN master controls up to 16 LIN slave nodes.
- Low-speed data: Transmits at 19.2 kbps, ideal for comfort systems.
- Sleep/wake feature: Nodes sleep to save energy, waking on command.
- 12V power: Runs on standard automotive voltage.
Single-wire setup: Uses just one wire for all LIN communication.
What Are The Errors In The LIN Protocol?
Errors in the LIN protocol often occur during data transfer between the LIN master and LIN slave devices. These issues typically involve corrupted bytes, unexpected timing, or interruptions in the communication stream.
One common source of error is when a LIN node enters LIN sleep mode unexpectedly or fails to wake properly, causing a loss in communication. Another issue arises from physical wiring faults or electrical noise on the bus line, which can distort signals.
Although LIN communication includes simple error detection methods, such as parity and checksum checks, it is less robust than systems like CAN. This makes it essential to monitor the network regularly, especially in environments with high interference or aging wiring.
Errors In The LIN Protocol
The LIN bus network relies on reliable data exchange between the LIN master and multiple LIN slave nodes. Any disruption in this communication can lead to system failure or unpredictable behavior in non-critical vehicle functions. Because the LIN protocol is simpler than others like CAN, it uses limited error detection.
This makes it more vulnerable to communication breakdowns, especially in environments where noise, faulty wiring, or synchronization issues occur. Each slave task depends on receiving accurate signals from the master. If these signals are corrupted or delayed, the system can malfunction or become unresponsive.
Common types of LIN protocol errors include:
- Checksum errors – When a message fails the checksum validation, the system detects data corruption.
- Sync problems – When a slave node cannot align its internal clock with the master’s LIN signal.
- LIN ID parity errors – Occur when the identifier’s parity bits are incorrect, resulting in command misinterpretation.
Physical bus errors – Include broken wires, short circuits, or loose connections in the bus line.
These errors often impact how LIN communication flows through the LIN bus network, leading to lost or delayed LIN data. Diagnosing such issues typically requires specialized tools that can monitor signals, check for corrupted frames, and verify node responses during a slave task cycle.
Comparison With Other Protocols
Modern vehicles use both LIN and CAN for different tasks. A LIN cluster connects low-cost parts like switches, mirrors, and seat motors. These systems use a simple master-slave setup with short commands. The LIN bus network sends slower signals over a single wire to save cost and reduce wiring.
In contrast, CAN supports fast data flow. Engineers use it for safety systems like brakes and engine control. CAN handles large amounts of data with strong error checking. LIN, however, follows the SAE J2602 standard for non-critical systems.
Together, LIN and CAN create a balanced system. LIN keeps costs low for basic features. CAN ensures safety where it matters most.
Structure Of LIN Systems
The LIN bus system uses a simple single-wire master/slave architecture. This design reduces wiring complexity and lowers manufacturing costs. One LIN master controls multiple LIN slave nodes through this shared wire. Each LIN node responds only when the master sends a command.
The network follows strict LIN specifications to maintain smooth communication. These specs define how each LIN message should be formatted and transmitted. Messages follow a scheduled structure to avoid data collisions. The system ensures that every node sends and receives data at the correct time, even in large embedded systems.
The design also supports scalability. You can easily add more nodes without major changes. The use of ISO 17987 ensures compatibility across different automotive brands and components.
Data Management In LIN
The LIN master manages all communication using deterministic scheduling. It sends messages at fixed times, which helps the system stay predictable and organized. This method ensures each LIN slave knows exactly when to listen or respond, reducing delays and confusion on the LIN bus system.
LIN supports several frame types to meet different communication needs. These include unconditional frames for regular updates, event-triggered frames for changes, and diagnostic frames for system checks. Each frame contains a set number of bits, and the system checks each bit for accuracy.
If something goes wrong, the system can flag it using an error code. This helps technicians quickly find and fix problems, keeping the line communication reliable and stable.
Advanced Topics In LIN
The LIN frame follows a simple yet effective structure. Each frame includes a header and a response. The header comes from the master device and contains synchronization bits, an identifier, and instructions. The slave node then sends back a response with the required LIN data.
Accurate timing plays a key role in how the system works. The master sends signals at expected intervals, helping all LIN nodes stay in sync. Network topology—or how each node connects—also affects how fast messages travel. A poor layout can cause delays or missed signals.
Error detection is built into the system. The LIN protocol uses checksums, parity bits, and error flags to catch mistakes during communication. Brands like the Volkswagen Group rely on these features to keep their cars running smoothly. This makes LIN communication both dependable and cost-effective for automotive systems.
Common Issues In LIN Bus Systems

The LIN bus system often shows issues through random part failures. You may press a window switch or a heated seat button, and nothing happens. These problems often come from a fault in the LIN interface. A weak signal, bad wiring, or damaged connector can cause a failure.
A faulty LIN chip inside a LIN node or LIN slave can also break communication. When that happens, LIN communication becomes unreliable. Nodes stop talking to each other. That breaks the flow of LIN data across the LIN bus network.
Here are a few common signs of a LIN bus problem:
- A switch or motor stops working for no clear reason.
- A scan tool shows LIN communication error codes.
- A link node fails to send or receive data.
The bus line has weak, broken, or noisy signals.
A weak LIN signal may affect several systems. For example, you may lose power to mirrors, locks, or seat controls. These systems depend on a working LIN interface and a stable LIN chip. If problems continue, ask a trained tech to check the bus line and LIN nodes.
Mercedes C300 Case Study

A Mercedes C300 faced issues with its heated seats and mirror controls. The seat motor and mirror motor stopped responding to commands. The problem stemmed from a failure in the LIN bus communication system.
Technicians used diagnostic tools to read error codes. They monitored the LIN bus signals for any irregularities. The next step was to check the line wire. The wire showed signs of damage, which affected communication between nodes.
They tested the slave nodes to ensure they were working properly. A faulty slave device was found, interrupting the communication flow. However, the master node was still operational, sending and receiving commands correctly.
To fix the issue, the technicians replaced the damaged slave devices. They also repaired the lin wire. After completing these repairs, the heating and mirror systems began working again. Proper communication across the LIN bus network was restored, and all components functioned as expected.
Mitigating LIN Bus Challenges
To mitigate LIN bus issues, preventive measures are essential. Regular maintenance and inspections can help detect early signs of trouble before they lead to system failures. For example, checking the integrity of the lin wire and ensuring proper communication between nodes can avoid unexpected breakdowns.
In industrial applications, maintaining a robust LIN bus network is especially important, as these systems rely on accurate communication for smooth operation. Ensuring that the latest version is used can also help improve system performance and minimize errors.
Adopting best practices for maintenance is key. Always use high-quality components to prevent wear and tear. Proper installation is equally critical, as incorrect setups can lead to long-term issues. Following manufacturer guidelines helps maintain system integrity and ensures optimal performance of the LIN bus network.
LIN Bus Error Types And Causes
LIN bus errors can disrupt communication between nodes. These errors can affect vehicle functions, leading to malfunctions or failures. Common causes include data corruption, synchronization problems, and physical bus line issues. Identifying these errors is crucial to keeping the system running smoothly.
Here are the common error types:
- Checksum Error: Occurs when the data integrity check fails.
- Sync Error: Happens when slave nodes can’t synchronize with the master.
- LIN ID Parity Error: Occurs due to incorrect parity bits in the identifier.
- Physical Bus Error: Caused by short circuits, open circuits, or damaged wires.
Response Error: Happens when the slave node doesn’t respond correctly.
These errors may arise from various causes. For example, electrical interference can corrupt data, leading to checksum errors. A sync error can happen if the master signal is faulty or if there are timing issues.
Similarly, physical bus errors are often due to wiring problems, such as broken or loose connections in the wiring. Fixing these errors quickly ensures the system’s proper functioning.
Conclusion
Maintaining a healthy LIN bus system is crucial for the reliable operation of modern vehicle functions. Proper diagnostics and timely repairs can prevent minor issues from escalating into significant problems. If you encounter persistent LIN bus issues, consult a certified mechanic or automotive electronics specialist for professional assistance.
FAQs
Q1: What Is A LIN Bus Issue?
A LIN bus issue occurs when communication between the master and slave nodes fails. This disruption can affect the performance of connected components. It may cause malfunctions in non-critical systems, like seat controls or lighting.
Q2: How Can I Diagnose A LIN Bus Fault?
To diagnose a LIN bus fault, follow these steps:
- Use diagnostic tools: Read error codes and monitor bus signals.
- Check wiring and connectors: Inspect for physical damage or loose connections.
- Test node functionality: Ensure the master and slave nodes are working correctly.
These steps will help you identify problems and maintain system reliability.
Q3: What Causes Physical Bus Errors In LIN Systems?
Physical bus errors happen due to:
- Damaged wires: Frayed or broken line wire disrupts communication.
- Poor connections: Loose or corroded connectors cause intermittent faults.
- Electrical interference: External noise corrupts signals.
Promptly addressing these issues ensures stable communication across the network.
Q4: How Does The LIN Protocol Differ From CAN?
LIN and CAN differ in several ways:
- Speed and complexity: LIN is slower and simpler than CAN.
- Cost: LIN is more cost-effective, ideal for non-critical functions.
- Applications: LIN handles non-critical systems, while CAN manages critical functions like engine control and braking.
Understanding these differences helps you choose the right protocol for your application.
Q5: Can LIN Bus Issues Affect Vehicle Safety?
LIN bus issues typically impact non-critical functions, like seat adjustments. However, if LIN integrates with critical systems, failures can have indirect safety effects. Issues may distract the driver or affect vehicle control, which could compromise safety.
Q6: How Can I Prevent LIN Bus Issues?
To prevent LIN bus issues:
- Conduct regular maintenance: Perform routine diagnostics and inspections.
- Use quality components: Invest in high-quality wiring and connectors.
- Ensure proper installation: Follow installation guidelines carefully.
- Adhere to standards: Follow ISO 17987 and manufacturer recommendations.